Overview
Material Derivatives: Lagrangian v.s. Eulerian
We define material derivative as
E.g.,
$\textbf{u}$: material (fluid) velocity. Many other names: Advective/Lagrangian/particle derivative.
Intuitively, change of physical quantity on a piece of material =
- change due to time $\frac{\partial}{\partial t}$(Eulerian)
- change due to material movement $\textbf{u} \cdot \nabla$
(Incompressible) Navier-Stokes equations
where $\mu$: dynamic viscosity; $\nu = \frac{\mu}{\rho}$: kinematic viscosity.
Operator splitting
Split the euqations above into three parts:
$\alpha$: any physical property (temperature, color, smoke density etc.)
Eulerian fluid simulation cycle
Time discretization with splitting: for each time step,
Advection: “move” the fluid field. Solve $\textbf{u}^{*}$ using $\textbf{u}^{t}$
External forces (optional): evaluate $\textbf{u}^{*}$ using $\textbf{u}^{}$
Projection: make velocity field $\textbf{u}^{t+1}$ divergence-free based on $\textbf{u}^{**}$
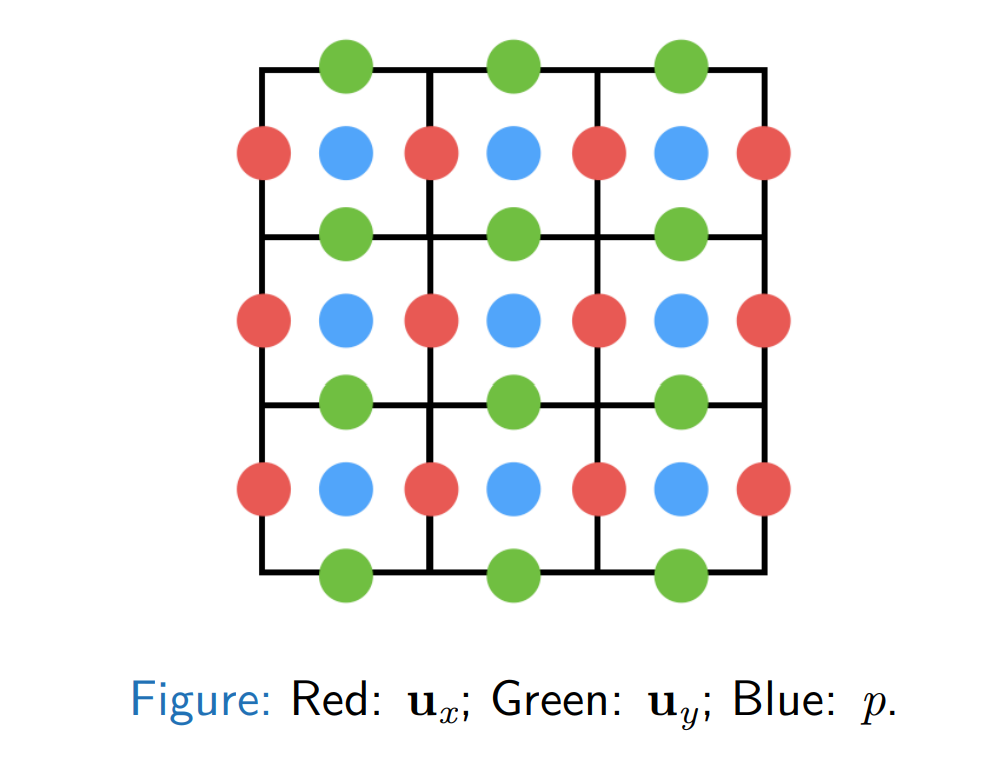
Grid
Spatial discretization using cell-centered grids or staggered grids
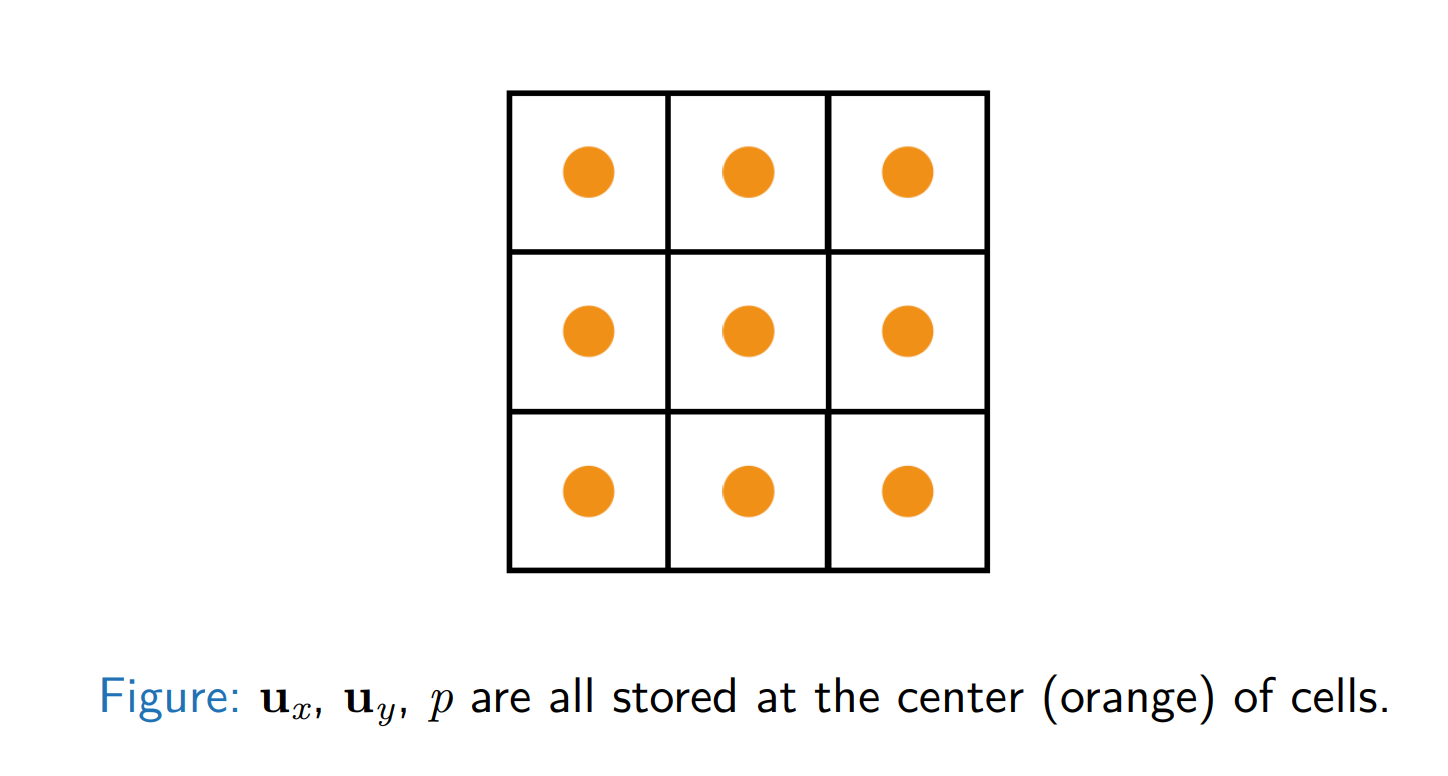
v.s.
And for any point within a grid, just use bilinear interpolation. As it’s an obvious and straightforward method, we move on
Advection
Advection schemes
A trade-off between numerical viscosity, stability, performance and complexity:
- Semi-Lagrangian advection
- MacCormack/BFECC
- BiMocq
- Particle advection (PIC/FLIP/APIC/PolyPIC)
- …
Semi-Lagrangian advection
- To find a fluid value at grid point $\vec{x}{G}$ at the new time step, we need to know where the fluid at $\vec{x}{G}$ was one time step ago, position $\vec{x}_{P}$, following the velocity field.
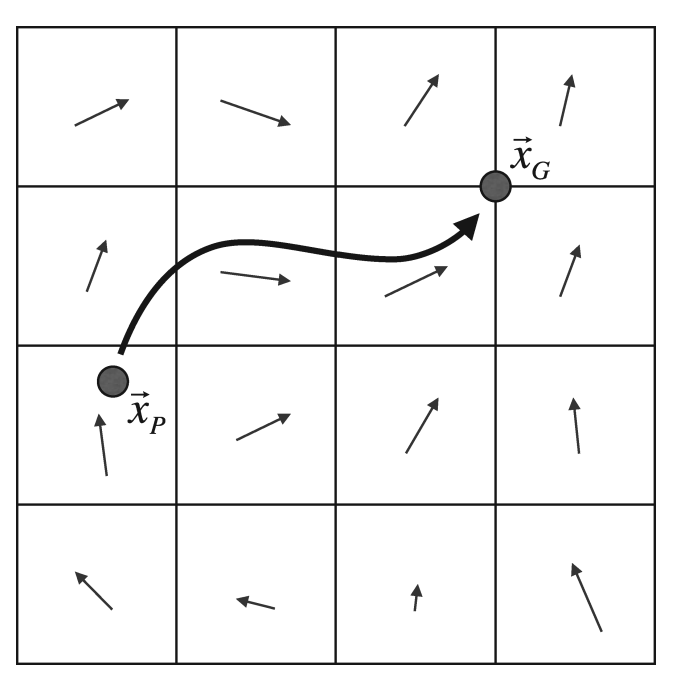
- Now we use bilinear interpolation, our basic semi-Lagrangian formula, assuming the particle-tracing algorithm has tracked back to location $\vec{x}_{P}$ is
Problem: The real trajectory of material parcels can be complex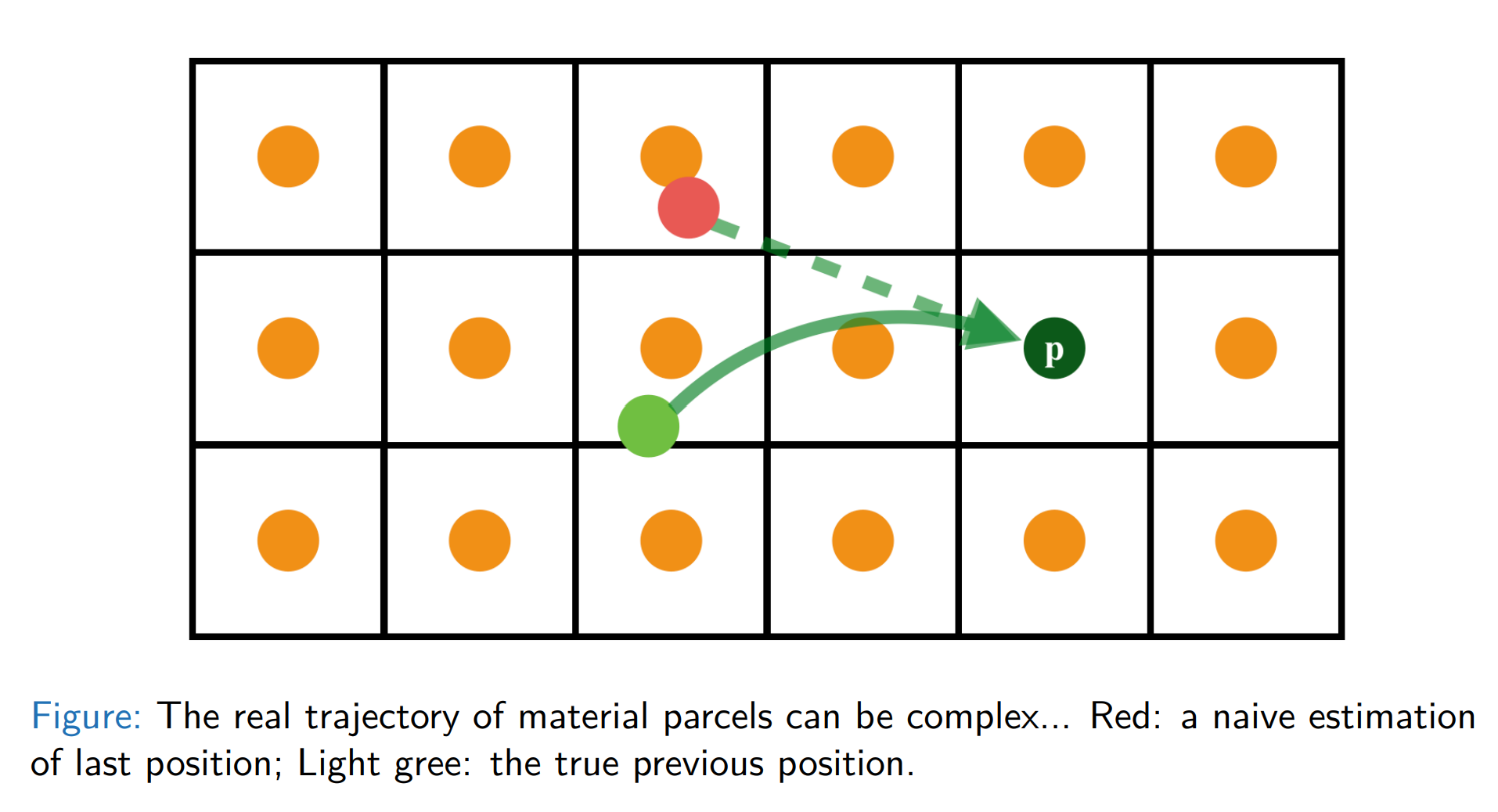
Solve the problem - Backtrace Method
Initial value problem (ODE): simply use explicit time integration schemes
- Forward Euler (“RK1”)
- Explicit Midpoint (“RK2”)
- RK3
BFECC and MacCormack advection schemes
BFECC: Back and Forth Error Compensation and Correction
- $\textbf{x}^{*} = \text{SL}(\textbf{x}, \Delta t)$
- $\textbf{x}^{*} = \text{SL}(\textbf{x}^{}, - \Delta t)$
- Estimate the error $\textbf{x}^{error} = \frac{1}{2}(\textbf{x}^{**} - \textbf{x})$
- Apply the error $\textbf{x}^{final} = \textbf{x}^{**} + \textbf{x}^{error}$
Be careful: need to prevent overshooting.
Projection
The project routine will subtract the pressure gradient from the intermediate velocity field $\vec{u}$
Actually after we combine the two euqations together we could easily get:
… which is Poisson’s equation
If $f = 0$, the equation is called Laplace’s equation
Spatial discretization (2D)
Recall the euqation for $p$:
Discretize on a 2D grid:
Again, a linear system:
$n, m$: numbers of cells along the $x-$ and $y-$ axis
Solving large-scale linear systems
- Direct solvers (e.g. PARDISO)
- Iterative solvers
- Gauss-Seidel
- (Damped) Jacobi
- (Preconditioned) Krylov-subspace solvers (e.g., conjugate gradients)
Extend reading
A great introduction to Eulerian fluid simulation: Fluid simulation for computer graphics by Robert Bridson
An Introduction to the Conjugate Gradient Method Without the Agonizing Pain
A introduction to Conjugate Gradient Method in Chinese