Deformation
Deformation map $\phi : a$ (vector to vector) function that relates rest material position and deformed material position.
Note: Deformation gradients are translational invariant
- $\phi1 = \phi(\mathbf{x}\mathbf{rest})$ and $\phi2 = \phi(\mathbf{x}\mathbf{rest}) + \mathbf{c}$ have the same deformation gradients
Deformation gradient - $\textbf{F}$
Deform/rest volume ratio $J = det(\textbf{F})$
Hyperelasticity
Hyperelastic materials: materials whose stress-strain relationship is defined by a strain energy density function
Intuitive understanding: $\Psi$ is a potential function that penalizes deformation.
“Stress”: the material’s internal elastic forces
“Strain”: just replace it with deformation gradient F for now
Stress tensor
Stress stands for internal forces that infinitesimal material components exert on their neighborhood.
Based on our need, we use different measures of stress
The First Piola-Kirchhoff stress tensor (PK1): $\textbf{P}(\textbf{F}) = \frac{\partial \Psi(\textbf{F})}{\partial \textbf{F}}$ (easy to compute, but in rest space)
Kirchhoff stress: $\tau$
- Cauchy stress tensor: $\sigma$ (symmetric, because of conservation of angular momentum)
Relationship: $\tau = J\sigma = \textbf{P}\textbf{F}^{T}$ $\textbf{P}=J\sigma\textbf{F}^{-T}$ Traction $\textbf{t} = \sigma^{T}\textbf{n}$
Intuition of $\textbf{P}=J\sigma\textbf{F}^{-T}$ :
$J$ compensate for material compression/expansion.
$\textbf{F}^{-T}$ compensates for material deformation. (Note that it’s $\textbf{F}^{-T}$ instead of $\textbf{F}^{-1}$ since we transform the normal n instead of x.)
Elastic moduli (isotropic materials)
- Young’s modulus $E = \frac{\sigma}{\epsilon}$
- Bulk modulus $K = -V \frac{dP}{dV}$
- Poisson’s ratio $v \in [0.0, 0.5)$ (Auxetics have negative Poisson’s ratio)
Lamé parameters:
- Lamé’s first parameter $\mu$
- Lamé’s second parameter $\lambda$ (aka. shear modulus, denoted by $G$)
Useful conversion formula:
Hyperelastic material models
Popular ones in graphics
- Linear elasticity (small deformation only)
- Neo-Hookean
- (Fixed) Corotated
See details at The Material Point Method for Simulating Continuum Materials
FEM(Finite Element Method) basics
The finite element method
Galerkin discretization scheme that builds discrete equations using weak formulations of continuous PDEs.
Wikipeida - https://en.wikipedia.org/wiki/Finite_element_method
Periodic Table of the Finite Elements - https://www-users.cse.umn.edu/~arnold/femtable/index.html
Linear tetrahedral (triangular) FEM
Linear tetrahedral finite elements (for elasticity) assume the deformation map $\phi$ is affine and thereby deformation gradient F is constant within a single tetrahedral element:
For every element $e$, its elastic potential energy
Computing $\textbf{F}_{e}$ in linear tetrahedral finite elements
First let’s elimiate $\textbf{b}$
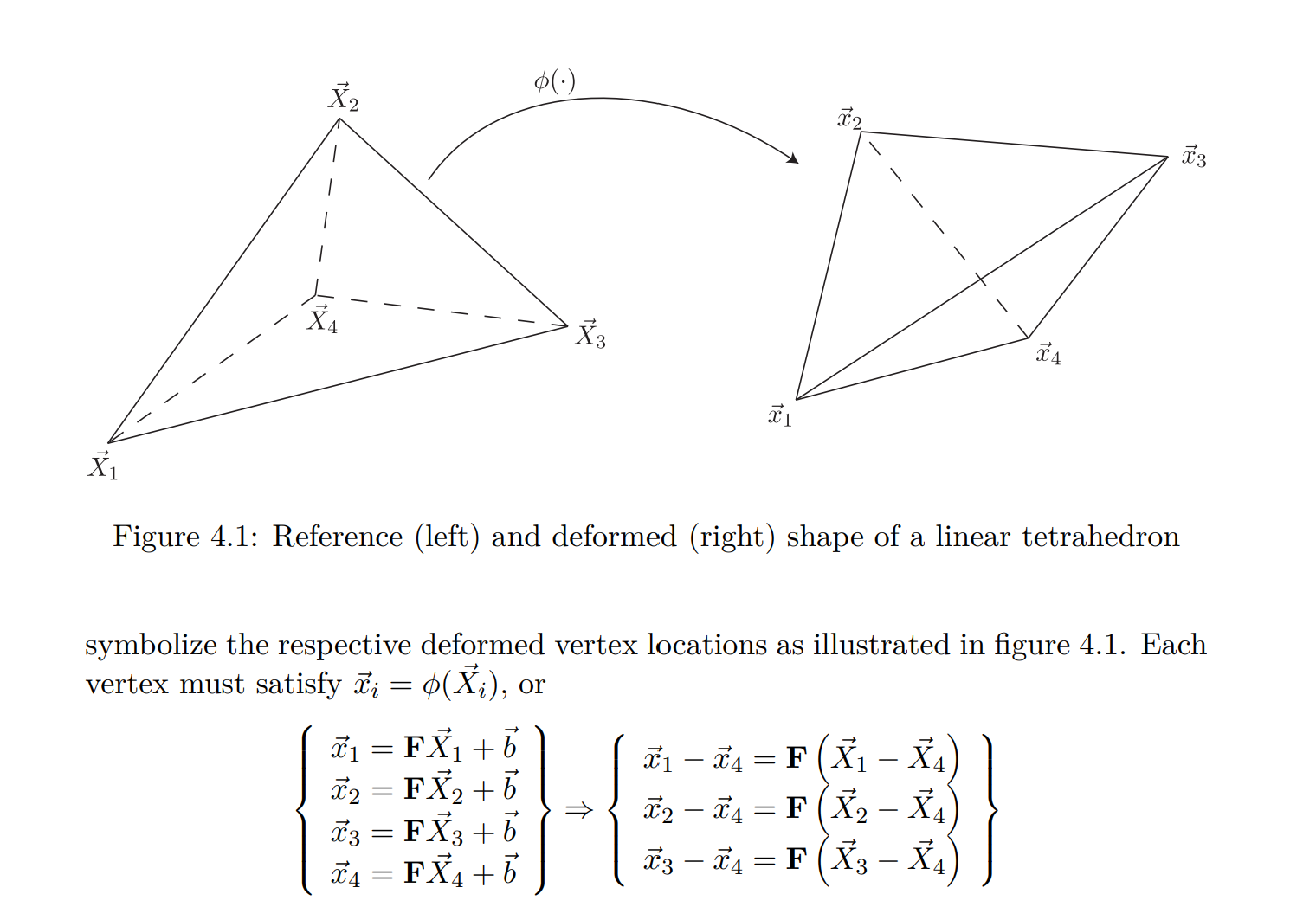
So now we have the equations
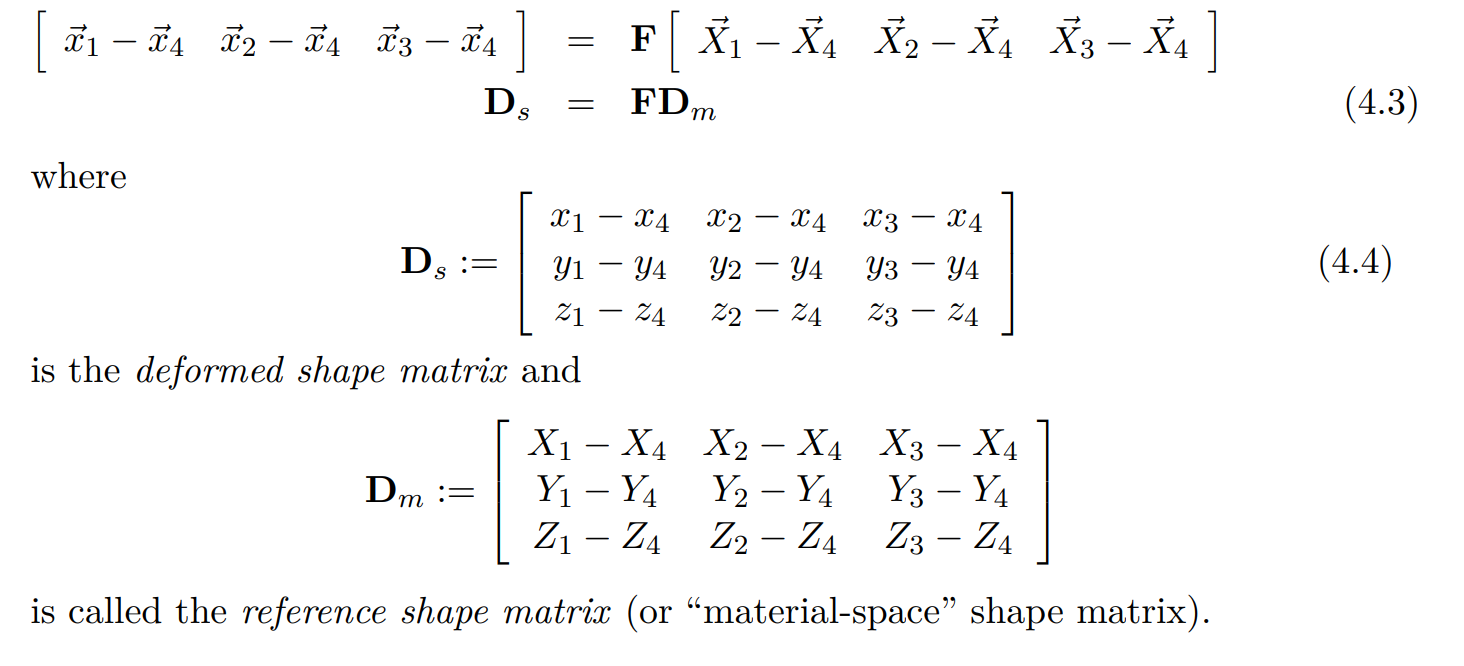
Name $\textbf{B} = \textbf{D}_{m}^{-1}$, we have
Note that $\textbf{B}$ is a constant throughout the physical process. Therefore it should be pre-computed.
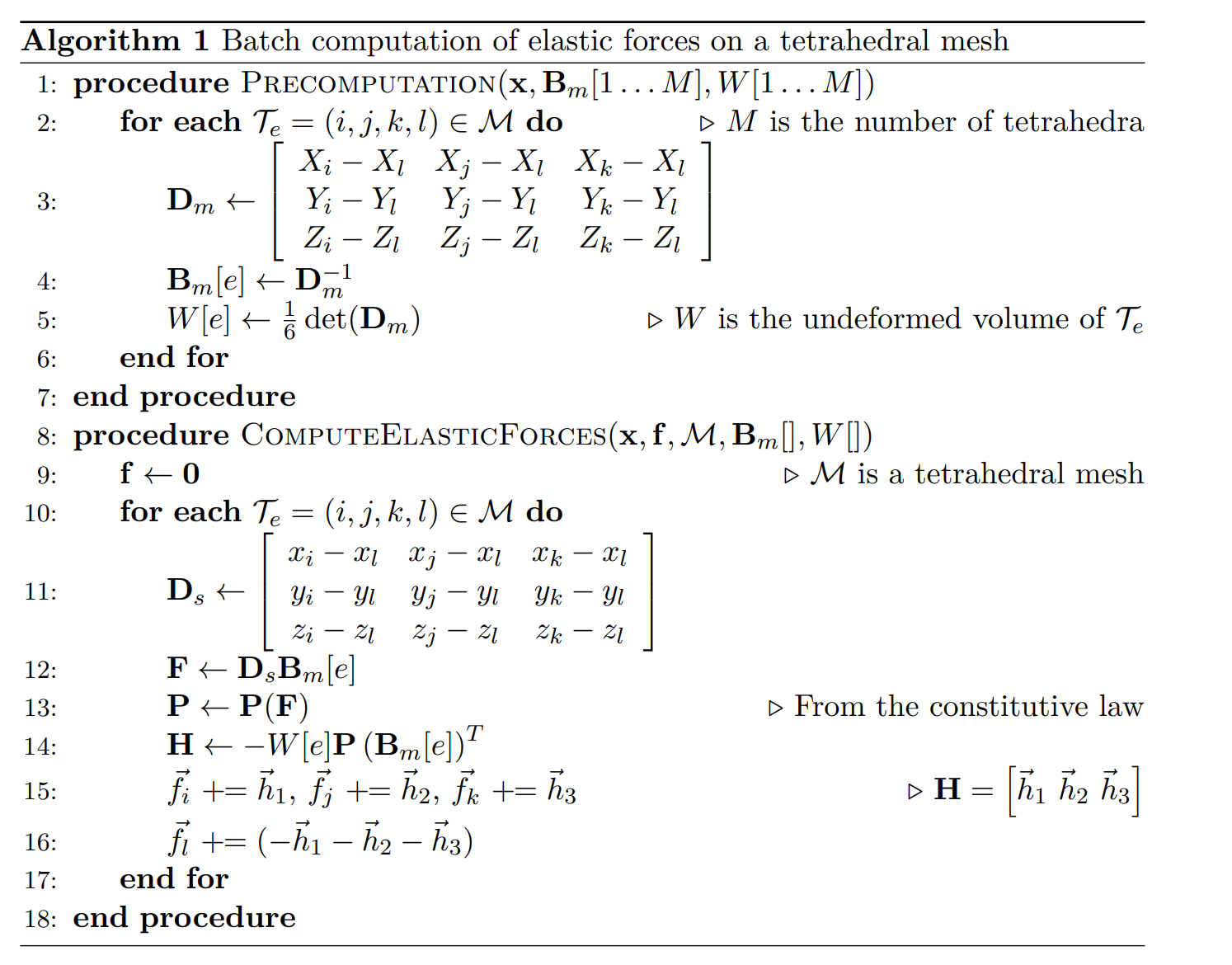
Pseudo code